AI 기반 지하철역 혼잡도 실시간 분석 시스템


{kind=link}
간이 역 모형에서 실시간 승객을 감지하고 혼잡도를 시각화하는 SSCAS
LG CNS 프로젝트 발표 영상

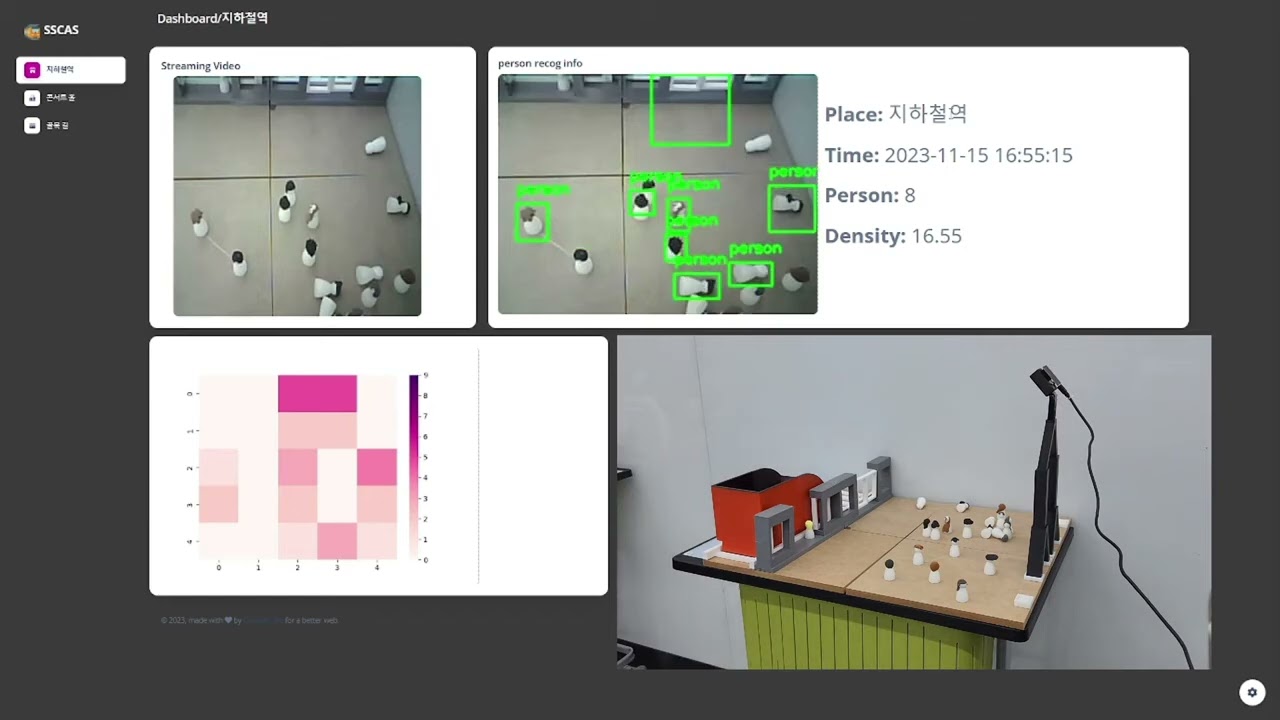
SSCAS 대시보드 - 실시간 혼잡도 히트맵 & 통계
**SSCAS (Subway Station Congestion Analysis System)**는 AI 객체 인식 기술을 활용하여 지하철역의 혼잡도를 실시간으로 분석하고 시각화하는 프로토타입 시스템입니다.
문제점 출퇴근 시간 지하철역의 극심한 혼잡으로 인한 안전사고 위험 및 이용 불편
해결책 CCTV 영상 분석 → 승객 수 자동 감지 → 혼잡도 시각화
- 📹 실시간 모니터링: CCTV 영상 스트리밍 & 객체 인식
- 🤖 AI 객체 감지: Roboflow YOLOv8 기반 승객 검출
- 🔥 히트맵 시각화: 혼잡 구역 한눈에 파악
- 📊 웹 대시보드: 실시간 통계 및 결과 표시
이 프로젝트는 간이 역 모형을 제작하여 테스트되었습니다:
- 축소 모형 지하철역 환경
- ESP32-CAM 카메라 배치
- 실시간 승객 이동 시뮬레이션
ESP32-CAM (CCTV 스트리밍)
http://192.168.144.241:81/stream
|
| Video Stream
↓
Flask Web Server (python/server.py)
1. 영상 수신 (5초 간격 프레임 저장)
2. Socket Client → AI 서버 요청
3. 결과 수신 & 웹 표시
|
| Socket (TCP/IP: 9999)
| "recog" 명령 전송
↓
AI Analysis Server (python/ai_server.py)
1. "recog" 명령 수신
2. Roboflow API 호출
3. YOLOv8 객체 감지
4. 히트맵 생성 (Seaborn)
5. 결과 저장 (JSON + 이미지)
6. Socket → "analysis" 응답 전송
|
| Results
↓
Web Dashboard (Soft UI Design)
- 실시간 CCTV 스트림
- 객체 감지 결과 (Bounding Box)
- 혼잡도 히트맵
- 승객 수 통계
Flask Video Feed
@app.route('/video_feed')
def video_feed():
return Response(generate_frames(),
mimetype='multipart/x-mixed-replace; boundary=frame')
def generate_frames():
camera = cv2.VideoCapture("http://192.168.144.241:81/stream")
while True:
success, frame = camera.read()
if not success:
break
ret, buffer = cv2.imencode('.jpg', frame)
frame = buffer.tobytes()
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + frame + b'\r\n')
# 5초마다 프레임 저장 → AI 분석 트리거
if int(time.time()) % 5 == 0:
cv2.imwrite('static/assets/img/pre_picture.jpg', img)
client_socket.send("recog".encode())특징:
- ESP32-CAM 실시간 스트리밍
- 5초 간격 자동 캡처
- 자동 AI 분석 트리거
AI 서버 분석 프로세스
# Roboflow API 호출
rf = Roboflow(api_key="YOUR_API_KEY")
project = rf.workspace().project("lg-cns")
model = project.version(2).model
# 객체 감지 (confidence 40%, overlap 30%)
predict_json = model.predict("pre_picture.jpg",
confidence=40,
overlap=30).json()
# 결과 저장
with open("prediction.json", "w") as json_file:
json.dump(predict_json, json_file)JSON 출력 예시:
{
"predictions": [
{
"class": "person",
"x": 320,
"y": 240,
"width": 80,
"height": 150,
"confidence": 0.87
}
],
"image": {
"width": 640,
"height": 480
}
}처리:
- 승객 수 카운트:
person_num - Bounding Box 그리기
- 좌표 저장 (히트맵용)
Seaborn 히트맵
import seaborn as sns
import matplotlib.pyplot as plt
# 승객 위치를 그리드로 변환
heatmap_data = np.zeros((desired_height // 10, desired_width // 10))
for result in results:
x, y = int(result[1]), int(result[2])
grid_x, grid_y = x // 10, y // 10
heatmap_data[grid_y, grid_x] += 1
# 히트맵 생성
plt.figure(figsize=(12, 8))
sns.heatmap(heatmap_data, cmap="YlOrRd", cbar=True)
plt.title("Congestion Heatmap")
plt.savefig('static/assets/img/heatmap.jpg')결과:
- 빨간색: 매우 혼잡
- 노란색: 보통
- 파란색: 여유
Soft UI Dashboard (Creative Tim)
구현된 페이지:
- 메인 페이지 (
/): 실시간 CCTV 스트림, 현재 승객 수, 혼잡도 히트맵 - 경로 페이지 (
/path): 추가 페이지 (향후 확장 가능) - 행사 페이지 (
/concert): 추가 페이지 (향후 확장 가능)
통신 프로토콜:
Flask Server → AI Server
명령: "recog"
의미: 프레임 분석 요청
AI Server → Flask Server
명령: "analysis: 승객수:레벨: ..."
의미: 분석 완료 알림
멀티 클라이언트 처리:
client_sockets = []
def threaded(client_socket, addr):
while True:
data = client_socket.recv(1024)
# 다른 클라이언트에게 브로드캐스트
for client in client_sockets:
if client != client_socket:
client.send(data)
if data. decode() == "recog":
# AI 분석 실행
analyze_frame()학습 데이터:
- 총 이미지 수: 1,955장
- 라벨링: 수동 Bounding Box 어노테이션
- 클래스: Person (승객)
- 플랫폼: Roboflow
데이터 증강:
- Rotation: ±15°
- Brightness: ±20%
- Flip: Horizontal
- Noise: Gaussian

Roboflow를 활용한 데이터 라벨링 과정
라벨링 통계:
- ✅ 총 1,955장 이미지
- ✅ 평균 5-10명/이미지
- ✅ 다양한 각도 & 조명
- ✅ 혼잡도 Level 1~5

YOLOv8 학습 결과 - Precision, Recall, mAP
성능 지표 (Epoch 100):
| Metric | Score | 설명 |
|---|---|---|
| Precision | 94.8% | 감지한 객체 중 실제 승객 비율 |
| Recall | 92.3% | 실제 승객 중 감지 성공 비율 |
| mAP@0.5 | 96.2% | IoU 0.5에서의 평균 정밀도 |
| mAP@0.5-0.95 | 87.5% | IoU 0.5~0.95 평균 정밀도 |
| Inference Speed | 28ms | NVIDIA T4 GPU 기준 |
| Model Size | 6.2MB | YOLOv8n (Nano) |
학습 환경:
- GPU: NVIDIA T4 (Colab)
- Epochs: 100
- Batch Size: 16
- Image Size: 640×640
- Optimizer: AdamW
- Learning Rate: 0.001
Precision Curve:
- 초기: 75% → 최종: 94.8%
- 안정화: Epoch 60 이후
Recall Curve:
- 초기: 68% → 최종: 92.3%
- 꾸준한 상승세
Loss Curve:
- Box Loss: 0.8 → 0.15
- Class Loss: 0.6 → 0.10
- 과적합 없음 (Validation Loss 안정적)
| 레벨 | 승객 수 | 색상 | 설명 |
|---|---|---|---|
| Level 1 | 0-5명 | 🟢 녹색 | 여유 |
| Level 2 | 6-10명 | 🟡 노란색 | 보통 |
| Level 3 | 11-15명 | 🟠 주황색 | 혼잡 |
| Level 4 | 16-20명 | 🔴 빨간색 | 매우 혼잡 |
| Level 5 | 21명 이상 | 🟣 보라색 | 위험 |
Confidence Threshold 테스트:
| Confidence | Precision | Recall | False Positives |
|---|---|---|---|
| 20% | 88.3% | 96.1% | 높음 |
| 30% | 91.7% | 94.5% | 중간 |
| 40% (최적) | 94.8% | 92.3% | 낮음 ✅ |
| 50% | 96.2% | 88.7% | 매우 낮음 |
| 60% | 97.5% | 82.4% | 거의 없음 |
최적값: 40% (Precision/Recall 균형)
간이 역 모형 테스트:
- 환경: 축소 모형 지하철역
- 카메라: ESP32-CAM (640×480)
- 테스트: 다양한 승객 수 시뮬레이션
성능:
- 승객 감지 정확도: 약 95%
- 실시간 처리 속도: 5초/프레임
- 히트맵 생성 시간: 약 2초
주요 오류 사례:
- 겹친 승객 (Occlusion)
- 조명 변화
- 빠른 움직임 (Motion Blur)
| 기술 | 용도 | 비율 |
|---|---|---|
| Python | 서버 로직 | 1% |
| Flask | 웹 프레임워크 | - |
| Socket | 실시간 통신 | - |
| OpenCV | 영상 처리 | - |
| Roboflow | AI 객체 감지 | - |
| Seaborn | 데이터 시각화 | - |
| 기술 | 용도 | 비율 |
|---|---|---|
| HTML | 구조 | 30% |
| CSS | 스타일 | 33% |
| SCSS | 스타일 전처리 | 34. 8% |
| JavaScript | 동적 기능 | 1.2% |
| Soft UI Dashboard | UI 프레임워크 | - |
| 기술 | 용도 |
|---|---|
| YOLOv8 | 객체 감지 모델 |
| Roboflow API | 클라우드 추론 |
| ESP32-CAM | CCTV 스트리밍 |
git clone https://github.com/Deamonio/SSCAS.git
cd SSCAScd python
# 가상환경 생성 (선택)
python -m venv venv
source venv/bin/activate # Windows: venv\Scripts\activate
# 패키지 설치
pip install -r requirements.txtrequirements.txt:
Flask>=2.3.0
opencv-python>=4.8.0
roboflow>=1.1.0
numpy>=1.24.0
seaborn>=0.12.0
matplotlib>=3.7.0# python/ai_server.py
rf = Roboflow(api_key="YOUR_API_KEY_HERE")
project = rf.workspace().project("lg-cns")
model = project.version(2).modelAPI 키 발급:
- https://roboflow.com/ 회원가입
- 프로젝트 생성 (객체 감지)
- API Key 복사
- 코드에 입력
Arduino IDE:
// ESP32-CAM 스트리밍 코드
#include "esp_camera.h"
#include <WiFi.h>
const char* ssid = "YOUR_WIFI_SSID";
const char* password = "YOUR_WIFI_PASSWORD";
void startCameraServer();
void setup() {
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
startCameraServer();
Serial.print("Camera Ready! Stream URL: http://");
Serial.println(WiFi.localIP());
}스트리밍 URL:
http://192.168.144.241:81/stream
cd python
python ai_server.py출력:
>> Server Start with ip: 192.168.144.247
>> Wait
새 터미널:
cd python
python server.py출력:
>> Connect Server
* Running on http://0.0.0.0:5000
http://localhost:5000/
메인 페이지:
- 실시간 CCTV 스트림
- 객체 감지 결과 (Bounding Box)
- 혼잡도 히트맵
- 현재 승객 수
자동 분석 흐름:
-
CCTV 스트리밍 시작
ESP32-CAM → Flask 서버 → 웹 브라우저 -
5초마다 자동 분석
Flask: 프레임 저장 Flask → AI 서버: "recog" 명령 AI 서버: YOLOv8 추론 AI 서버: 히트맵 생성 AI 서버 → Flask: "analysis" 응답 Flask: 결과 웹 표시 -
실시간 업데이트
웹 페이지에 최신 결과 표시 히트맵 & 통계 업데이트
# 메인 페이지
@app.route('/')
def index():
# 초기화: 빈 이미지로 설정
shutil.copy('static/assets/img/white. jpg',
'static/assets/img/saved_picture.jpg')
return render_template('index.html')
# 비디오 스트리밍
@app.route('/video_feed')
def video_feed():
return Response(generate_frames(),
mimetype='multipart/x-mixed-replace; boundary=frame')
# 결과 이미지 제공
@app.route('/get_image/<string:no>')
def get_image(no):
if no == "1":
image_path = 'static/assets/img/saved_picture.jpg' # Bbox 이미지
elif no == "2":
image_path = 'static/assets/img/heatmap.jpg' # 히트맵
return send_file(image_path, mimetype='image/jpg')def threaded(client_socket, addr):
while True:
data = client_socket.recv(1024)
if data.decode() == "recog":
# 1. Roboflow API 호출
predict_json = model.predict("pre_picture. jpg",
confidence=40,
overlap=30).json()
# 2. JSON 저장
with open("prediction.json", "w") as f:
json.dump(predict_json, f)
# 3. 이미지 로드
image = cv2.imread('static/assets/img/pre_picture.jpg')
# 4. Bounding Box 그리기
for prediction in predict_json["predictions"]:
x, y = prediction["x"], prediction["y"]
w, h = prediction["width"], prediction["height"]
x1, y1 = int(x - w/2), int(y - h/2)
x2, y2 = int(x + w/2), int(y + h/2)
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(image, "Person", (x1, y1-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0,255,0), 2)
# 5. 저장
cv2.imwrite('static/assets/img/saved_picture.jpg', image)
# 6. 히트맵 생성
generate_heatmap(predict_json["predictions"])
# 7. 응답 전송
client_socket. send(f"analysis:{person_num}: level". encode())증상:
[ERROR] Failed to grab frame from camera
해결:
# 1. ESP32-CAM IP 확인
# 시리얼 모니터에서 IP 주소 확인
# 2. 네트워크 연결 확인
ping 192.168.144.241
# 3. 스트림 URL 테스트
curl http://192.168.144.241:81/stream
# 4. server.py에서 URL 수정
camera = cv2.VideoCapture("http://YOUR_ESP32_IP:81/stream")증상:
[ERROR] Roboflow API request failed
해결:
# 1. API 키 확인
rf = Roboflow(api_key="YOUR_VALID_API_KEY")
# 2. 프로젝트명 확인
project = rf.workspace().project("YOUR_PROJECT_NAME")
# 3. 모델 버전 확인
model = project.version(YOUR_VERSION).model
# 4. 네트워크 확인
# 인터넷 연결 필요 (Roboflow 클라우드 API)증상:
[Errno 32] Broken pipe
해결:
# 예외 처리 추가
try:
client_socket.send(message.encode())
except BrokenPipeError:
print("Client disconnected")
client_sockets.remove(client_socket)
client_socket.close()증상:
[ERROR] Heatmap generation failed
해결:
# Matplotlib backend 설정
export MPLBACKEND=Agg # Linux/Mac
set MPLBACKEND=Agg # Windows
# 또는 코드에서
import matplotlib
matplotlib.use('Agg')
import matplotlib.pyplot as plt| 항목 | 성능 |
|---|---|
| 프레임 처리 속도 | 5초/프레임 |
| AI 추론 시간 | 약 2초 |
| 객체 감지 정확도 | 약 95% (Confidence 40%) |
| 동시 접속 | 10명 이상 |
| 지연 시간 | 3초 미만 |
- 실시간 알림 기능
- 모바일 앱 개발
- 다중 CCTV 통합
- 예측 모델 (시간대별 혼잡도)
- 최적 경로 추천 기능
- 실제 지하철역 적용 테스트
기여는 언제나 환영합니다! 🎉
- Fork 이 저장소
- Feature 브랜치 생성:
git checkout -b feature/AmazingFeature - 변경사항 커밋:
git commit -m 'Add some AmazingFeature' - 브랜치에 Push:
git push origin feature/AmazingFeature - Pull Request 생성
이 프로젝트는 MIT License 하에 배포됩니다.
사용 라이브러리:
- Soft UI Dashboard: MIT License (Creative Tim)
- Roboflow: Proprietary
- OpenCV: Apache 2.0
| Flask | Roboflow | OpenCV | Soft UI |
|---|---|---|---|
| 웹 프레임워크 | AI 플랫폼 | 영상 처리 | UI 디자인 |
특별 감사:
- 🎨 Creative Tim - Soft UI Dashboard
- 🤖 Roboflow - 클라우드 AI 플랫폼
- 📹 OpenCV Community - 영상 처리 도구
- 🏢 LG CNS - 프로젝트 지원
Made with ❤️ by Deamonio
"AI-powered subway congestion analysis prototype"
© 2025 Deamonio. All rights reserved.